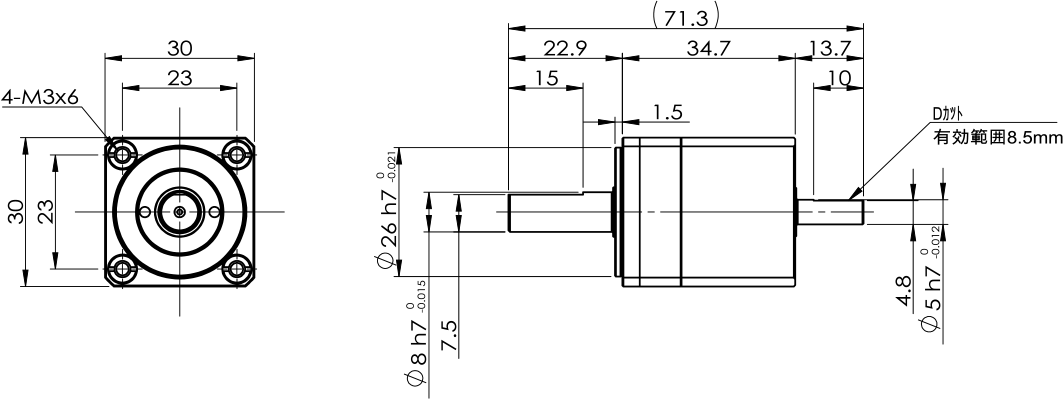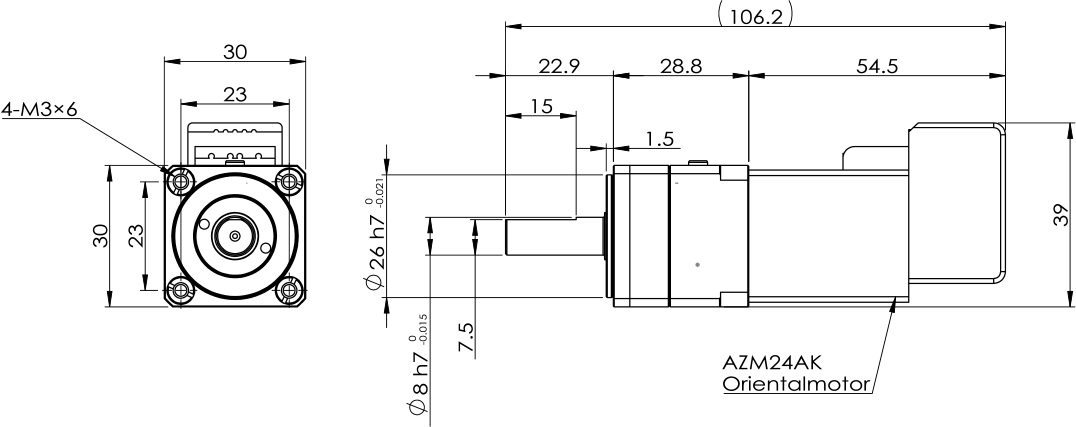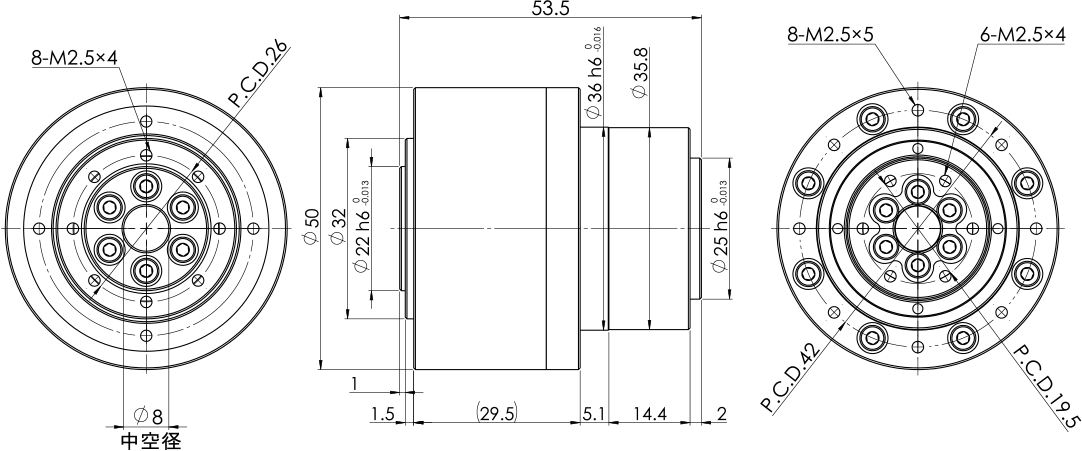

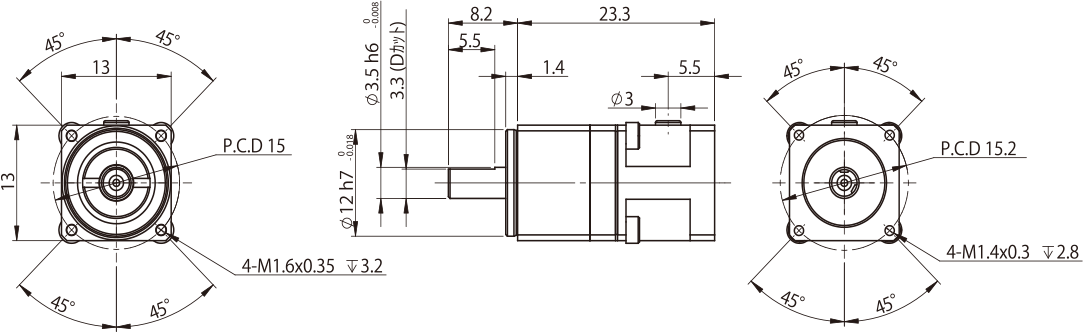
External Dimensions
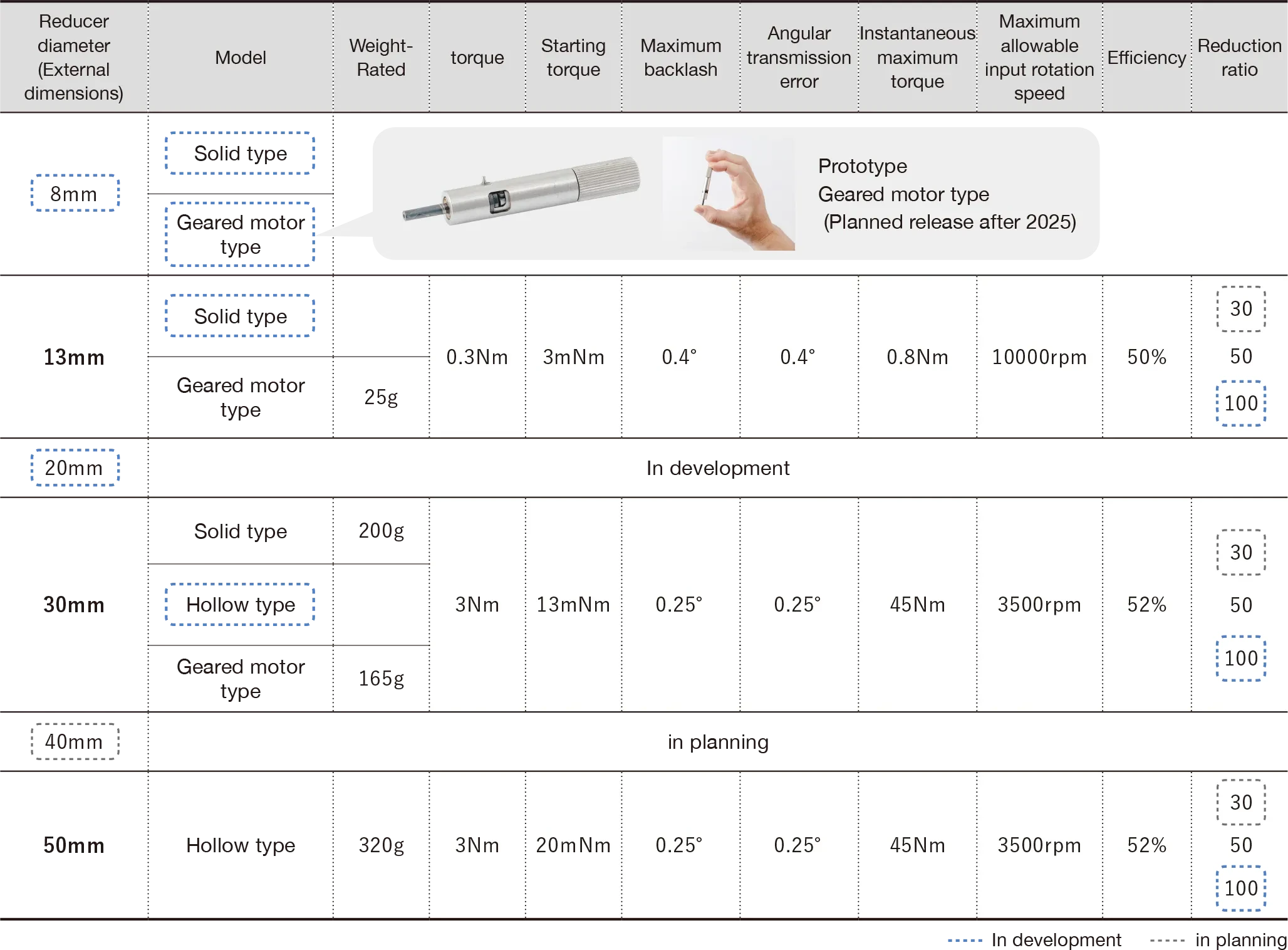
13mm
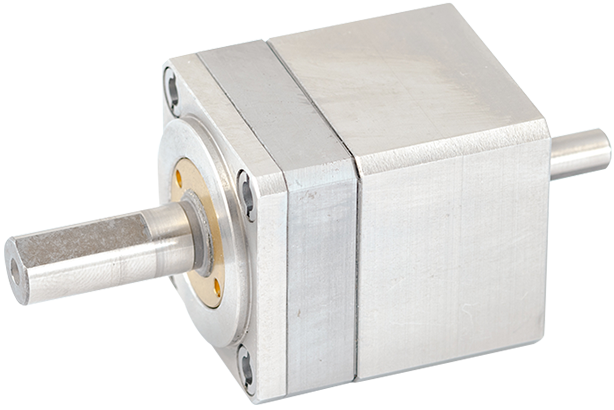
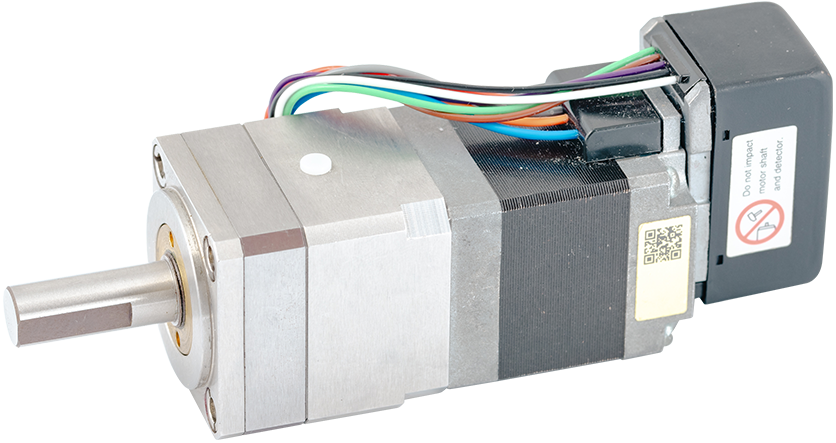
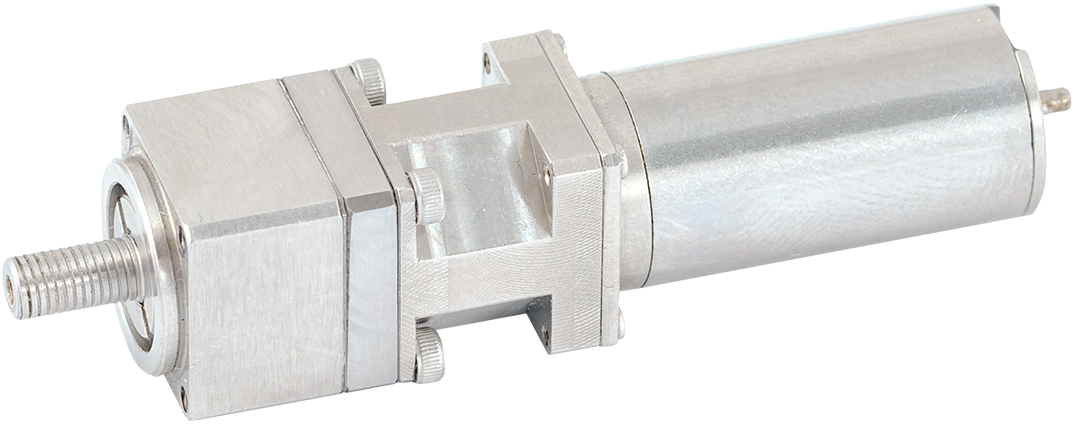
CRGN13
Geared Motor Type
- Reducer Unit Mass
- 25g
- Rated Torque
- 0.3Nm
- Instantaneous Maximum Torque
- 0.8Nm
- Intended Applications
- Finger joints of robot hands, and robot joints for small precision fields.
As the flagship model representing Crown Roboxgear, which is optimal as an ultra- compact, high-output precision reducer, it achieves twice the rated torque and more than 2.6 times the instantaneous maximum torque of typical ultra-compact reducers of the same size. It adopts Mabuchi Motor Micro Tech Co,.Ltd. high-torque, ultra-compact brushless DC motor Thumbelina for the motor.